如何利用多模态大模型进行视觉自回归图像生成?
如何利用多模态大模型进行视觉自回归图像生成?
青稞作者:阿秋Rachel,构建domain big picture
原文:https://zhuanlan.zhihu.com/p/716112475
目前利用多模态大模型进行图像生成主要有以下两种形式:
- LLM作为condtioner
利用MLLM依据用户输入的text prompt来生成条件信息,条件信息被注入到下游生成模型进行更精细化的生成控制。这种形式通常需要外接一个额外专门的多模态生成模型,例如Stable Diffusion、DALLE-3、GLIGEN等。
条件信息的形式通常是文本,通过利用MLLM对用户输入的text prompt进行润色,润色后输出的新的text prompt作为diffusion的文本条件,来生成更加复杂精美的图片。或者通过利用MLLM依据用户输入的text prompt生成layout信息,其中layout以文本形式指明物体类别和以bounding box形式指明物体位置。
- LLM作为generator
利用LLM不断生成image token完成生成的过程,根据近年的发展,我将其简单分为下面三类。
- visual autoregressive:SEED[1]、SEED-X[2]、DreamLLM[3] | Unified IO、Unified IO2、Chameleon、Lumina-mGPT[4]、ANOLE[5]
- visual scale autoregressive:VAR[6]、STAR[7]
- visual diffusion:Transfusion、Show-o
本文主要介绍LLM作为generator中的前两类。
visual autoregressive
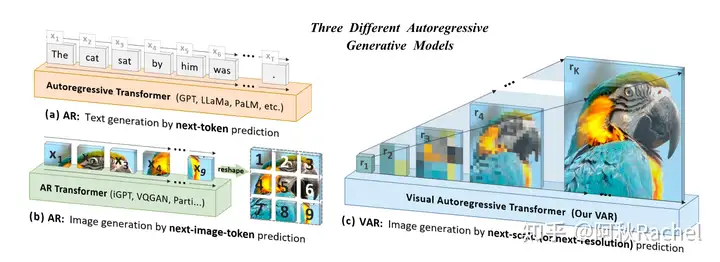
visual autoregressive指的是完全跟随大语言模型next-token prediction的autoregressive generation的想法,将图片的生成建模成一个接一个图片patch进行causal prediction的过程。在这种设置下,图像原本的continuous feature会借助VQ-GAN离散化为visual vocabulary (codebook) 中discrete visual feature,就可以统一text和image的学习,都采用CE loss去训练预测下一个token在各自vocabulary中的idx。
Non-native
SEED
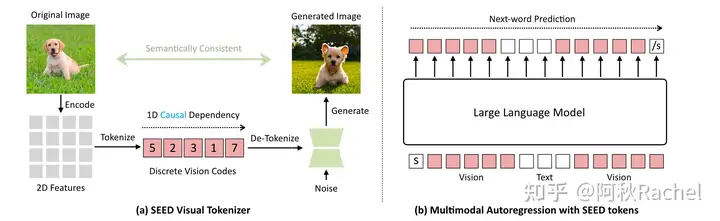
通过为LLM配备一个精心设计的discrete image tokenizer将图像离散化,统一了图像和文本表征输入LLM的形式都可以采用同样的next-token prediction的形式对text-to-image生成和image-to-text任务进行训练,完成生成和理解的统一。设计的原则包括:
discrete image token应该具备1D causal dependency,以兼容目前decoder-only LLM的单向注意力的结构
discrete image token应该像text token一样具备高层语义信息,以避免text和image的语义不对齐
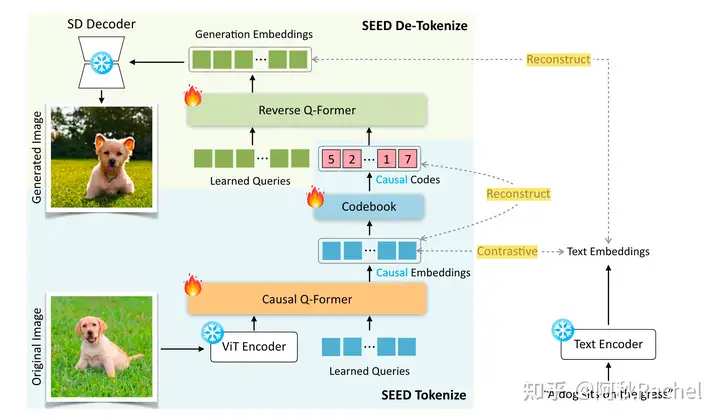
为了实现上述原则,提出了SEED tokenizer,由5个部分组成:ViT encoder、Causal Q-Former、VQ Codebook、Reverse Q-Former、UNet Decoder。其中ViT encoder和UNet decoder都直接采用预训练的模型并冻结(分别来自BLIP-2和Stable Diffusion)。
Causal Q-Former用于将ViT抽取出的具有2D dependency的图像特征转化为具有1D causal dependency的特征,然后会用VQ codebook将其离散化,得到具有1D causal dependency的discrete token。
此时的discrete image token就可以和text token拼接输入到LLM中进行图像理解以完成image-to-text的文本生成任务。
对于text-to-image的图像生成任务,则直接将text token输入到LLM中,以next-token prediction的方式预测出discrete image token,这些输出的image token将会作为条件信息输入到UNet Decoder进行生成,为了保证语义一致性,需要配备一个Reverse Q-Former,将输出的token转化为符合Stable Diffusion condition的分布(取代SD中的text condition,因此形式为77 tokens)。
为了能够保证离散化后image token的语义正确性,需要先进行SEED tokenizer的训练,该过程将会采用两阶段方式进行,需要text-image pair数据集,主要依赖于图文对齐任务:
- 第一阶段训练Causal Q-Former
Causal Q-Former的输入为Vision encoder提取出的图像特征和一系列learnable query。query之间采用causal self-attention的方式进行交互,以实现causal dependency,并且会通过cross-attention层和图片特征交互,因此输出的learnable query聚合了一系列图像特征。
然后用对比学习的方式,最大化图片last causal embedding和图片对应的captiontext feature的cosine similarity。(这里的1D causal dependency感觉是假的1D causal dependency,因为和图片特征的交互仍然是full-attention的,所以前面的query也可能和后面的query一样包含object同个part的信息,比如包含头上部分和头下部分,这样就仍然具有因果关系)
- 第二阶段训练VQ Codebook和Reverse Q-Former:
先将Causal Q-Former输出的一系列learnable query通过Codebook量化成一系列discrete code(前后数量保持不变),然后再利用multi-layer transformer去依据discrete code重建出量化前continuous causal embeddings,此处损失为重建前后的cosine similarity。
Reverse Q-Former将会含有77个learnable query token,彼此进行full self-attention的交互,并且Quantization后产生的discrete causal code通过cross attention进行交互,得到聚合了图像信息的77个learnable query token,然后和Stable Diffusion的计算出对应caption text feature计算MSE loss。
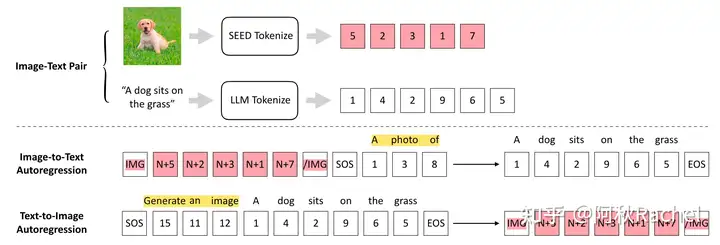
完成了SEED tokenizer的训练后,可以假定此时得到的discrete image token已经是有意义的,含有图片信息的feature了,此时可以接入LLM中,在image-text pair上进行text-to-image和image-to-text任务的自回归训练。
image-to-text:将Causal Q-Former输出的token通过一个FC层对齐到word embedding,然后和“a photo of a”进行拼接,输入到LLM中,进行后续对图片的文本描述的生成。
text-to-image:将“Generate an image”作为prefix和对应的caption进行拼接,输入到LLM中,要求其自回归的输出image token(以<IMG>引导),其next-token prediction的监督为配对图片经过ViT encoder、Causal Q-Former、VQ Codebook后得到的discrete code。(这点可以理解为SEED tokenizer在进行图像生成训练时UNet Decoder已经学会了依据ViT encoder、Causal Q-Former、VQ Codebook后得到的discrete code进行生成,因此这里想要生成图片,则可以认为最好的condition就是上述的discrete code,因此用它们来作为监督。)
至此,模型就可以通过输入图片完成文本生成相关任务(VQA、Caption、Retrieve),或者通过输入文本描述来生成图片。但可以发现,SEED框架仅是完成了多模态生成的部分任务,无法输入图文交替数据,也无法生成图文交替数据。
SEED-X
SEED-X是对SEED模型的进一步拓展,通过改变visual tokenizer机制并且在更丰富的数据集上进行预训练,可以覆盖更多的现实生活使用场景,包括图像编辑、交替的图文生成等等。在架构上相比于SEED主要具有以下改变:
- 抛弃了discrete image tokenizer的思路,采用ViT vision encoder作为continuous tokenizer,以提高多模态理解任务效果。
- 通过使用两阶段不同粒度condition注入策略来预训练visual tokenizer。
- 采用next-token prediction来监督text生成任务,用feature regression loss来监督图像生成任务。
也就是说SEED-X此时的visual tokenizer仅仅具有ViT encoder和UNet decoder,将ViT提取image feature并对齐的过程称之为Visual tokenize,将UNet decoder依据image feature进行图像生成(重建)的过程叫做de-tokenize。SEED-X不像SEED去执行三个不同训练任务,而是完全依赖图像重建任务去优化visual tokenizer。
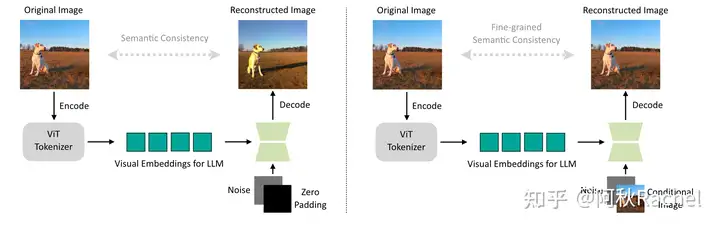
visual tokenizer预训练的重建任务分为两个阶段:
第一个阶段是以vision encoder输出的visual embeddings作为condition来重建原图。具体来说,ViT输出的特征将会通过average pooling聚合减少成64个token,然后通过在UNet decoder中插入的额外可学习的cross-attention,让这64个token实现与生成过程进行交互,完成条件信息的注入,此时还会额外放开UNet decoder中所有的keys和value。
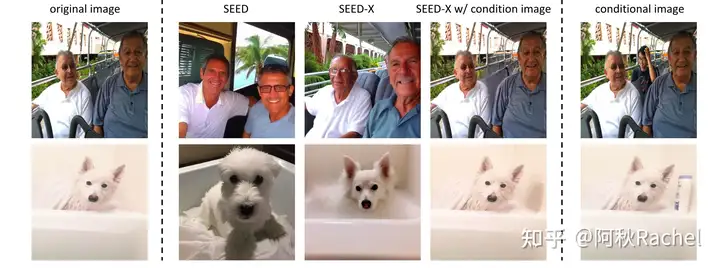
第二个阶段是额外添加image作为condition来重建原图。利用Stable Diffusion本身的VAE encoder将image编码到latent space然后和noise进行通道维度上的拼接,由于拼接上额外的输入,因此UNet的input channel将会扩大两倍,额外的channel和原本的channel在该阶段都会进行训练。此时ViT提供high-level的feature,而额外的image提供low-level feature,让visual tokenizer能够更好地学会重建。效果如图:
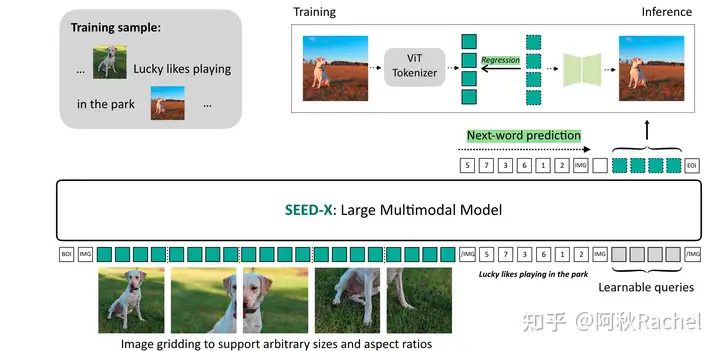
由于抛弃了discrete image tokenizer直接采用ViT作为continuous image tokenizer,SEED-X生成图片不再是通过LLM进行next-token prediction来逐个预测condition embedding,而是需要生成图片时,在输入的最后拼接上固定数量的learnable query,这些learnable query通过LLM处理,聚合了text instruction信息后,作为condition输入到UNet decoder中进行图片的生成。在多模态预训练时也无法再使用next-token prediction来监督图像生成任务,而是利用ViT输出的feature作为condition embedding的gt,进行feature MSE regression。
这点也是比较make sense的,在SEED-X visual tokenizer的预训练阶段,已经通过微调UNet Decoder让其能够依据ViT feature作为condition来生成对应正确图片,那么就可以认为要生成图片的ViT feature就是UNet Decoder所需要的最好的condition。那在图像生成任务训练过程中,我们有image-text pair,输入caption,输出对应预测的图像 condition feature,就应该让预测的condition feature和image的ViT condition feature越接近越好。而对于编辑任务,我们有image-edit image-edit instruction,输入image和edit instruction,输出对应预测的编辑图像 condition feature,就应该让就应该让预测的编辑图像 condition feature和edit image的ViT condition feature越接近越好。
DreamLLM
从对比的角度来看,DreamLLM与上述两个工作最主要的差别在于使用Diffusion生成相关的损失来监督图像的训练,DreamLLM认为通常CLIP-ViT捕捉的都是模态共享的、全局的特征,将ViT feature作为GT,会使得MLLM生成和理解也更加全局化。因此采用了Diffusion生成的loss来作为生成训练的监督。 该方法的主要的技术点如下:
- DreamLLM采用continuous embedding的方式来对image进行tokenize
- 采用一系列learnable query,通过聚合之前所有信息来作为当前图像生成的condition。
- 通过分数蒸馏的条件合成损失来监督图像生成部分的训练,不具有tokenizer预训练过程,SD全过程frozen。

第一点和第二点和SEED-X并没有太大的差别,因此不过多赘述,看图就可以理解。对于第三点,具体来说,DreamLLM将会在图文交替数据集上进行预训练,当到了生成图片的时候,会要求先预测出一个<dream>的special token代表需要开始生成图片,随后会拼接上一系列learnable query称之为dream queries,该dream queries将以causal decode的形式聚合之前生成的文本和图片的信息:

然后output dream queries将会作为SD的condition进行图像生成,此时采用噪声预测loss来监督condition的质量。

可以看到为了提升理解任务上的性能,后续的方案大多都重新换回了continuous tokenizer,同样因为这个原因,此时image token的生成就不再是next-token prediction了,而是依赖于一系列预定义好的learnable query作为输出,并行理解并输出得到生成模型的condition,此时甚至都有点偏离了visual autoregressive的定义,更像是visual image autoregressive,为了更清楚展示一些发展的脉络,因此还是把SEED-X和DreamLLM放在了此处进行介绍。
Native
可以看到上面我们提到的3个方案都还是需要额外的生成模型例如Stable Diffusion介入,而且LLM输出的image token都是作为condition甚至不能说是真的“image token”,更像是经过了LLM处理后对齐的text feature,不能说是LLM真的在生成图片,因此我称上面的为“Non-native”非原生生成,而下述的两个方案,就偏向于原生的生成,无需下游生成模型。
Lumina-mGPT
Unified IO、Unified IO2、Chameleon是我们在上一章所谈过的三个多模态基座模型,旨在通过一个统一的transformer完成对各个模态的encode和decode,完成各种各样的任务,其中就包括图像生成,它们都是以next-token prediction的形式生成image token并且直接通过vocabulary来decode image token完成生成。在上一篇中,我们比较详细地介绍了Unified IO、Unified IO2、Chameleon,此处不再赘述。
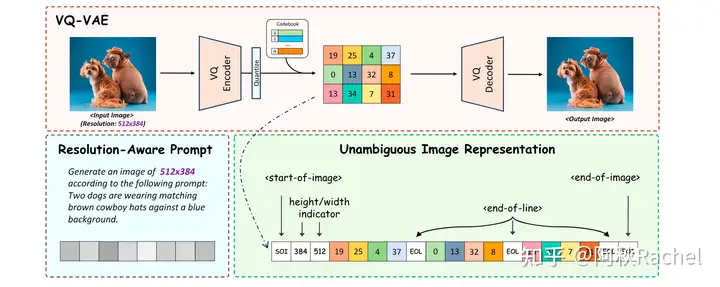
Unified IO、Unified IO2、Chameleon并没有强调自己是为了增强图像生成能力,而ANOLE和Lumina-mGPT主要是进一步增强这些unfied transform的图像生成能力,希望能够优化生成图像的质量和灵活性(更多分辨率,更多长宽比)。具体来说,Lumina-mGPT直接采用Chameleon预训练好的模型,然后进行了采用了10M的高质量数据对图像生成任务进行额外的学习,同时为了实现任意分辨率、长宽比的生成加入了以下techs:
在image embedding中插入了用来表示height/width的预定义指示符
图片每行token embedding末尾会插入一个<end-of-line>的特殊token
渐进分辨率文生图监督训练:
- 预定义了三个不同分辨率阶段:512、768、1024,每个阶段面积基本接近预定义值,但是长宽比有所差异。
- 为了让用户之后可以自定义要生成图片的分辨率,每个训练样本会插入一个resolution-aware prompt。
- 该过程还会额外插入OpenHermess中text-only数据和Mini-Gemini中image-text pair数据防止灾难性遗忘。
由于最近刚阅读了Stable Diffusion系列,可以发现上述的改进其实都和Stable Diffusion XL的思路一致。
ANOLE
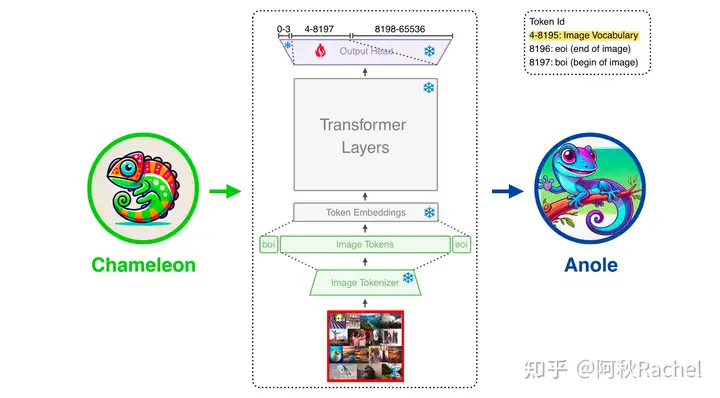
目前开源的chameleon并不支持除text外的其他模态生成,而ANOLE提出一个简单的数据和参数高效的方式去对chameleon进行微调,以实现不妥协文本生成和其他模态理解的情况下,拥有多模态生成能力。ANOLE是基于chameleon的,因此具有Native(原生)多模态模型、完全基于token无需diffusion介入生成过程的优点,是为了解决开源的chameleon没有开放图文交替生成的问题。
具体来说,ANOLE保持和chameleon结构一致,并且冻结chameleon大部分预训练权重,只微调lm_head中和image token idx预测相关的部分权重,微调数据集来自于LAION-5B art中5859张图片。
visual scale autoregressive
visual autoregressive这种建模方式对于图像来说似乎不是一种很自然的方式,图像是一个2D的输入数据,visual autoregressive是直接将其拉成1D进行建模,并且这种建模顺序也没有特定的说法,默认都是从左上角按顺序逐个生成直到右下角,但直觉上从外向内或者从内向外螺旋逐个生成也是合理的。
Visual scale autoregressive提供了一种更自然地建模图像的方式,每次autoregressive生成的图像token不再代表生成图像某个位置的patch feature,而是代表该图片在某个分辨率下的生成效果。因此Visual scale autoregressive在每个预定的分辨率下会并行的生成多个token,需要一个多尺度的VQ-VAE保证各个分辨率下都能重建出图片。
VAR
而VAR就是Visual scale autoregressive的开山之作,具体来说,VAR会训练一个具有K个尺度的VQVAE,一张图片通过这样multi-scale VQVAE就可以得到K个Token map,每个Token map具有不同的分辨率 \(h_i \times w_i\) 。每次自回归的进行是通过输入前k-1个token map拼接后的结果来预测第k个尺度下的token map。也就是说从原来输入逐个token拼接预测得到单独的下一个token,变成了每次自回归输入拼接上前一个尺度的token map,然后预测得到下一个分辨率的token map,token map中的 \(h_i \times w_i\) 个tokens将会被并行预测出来。
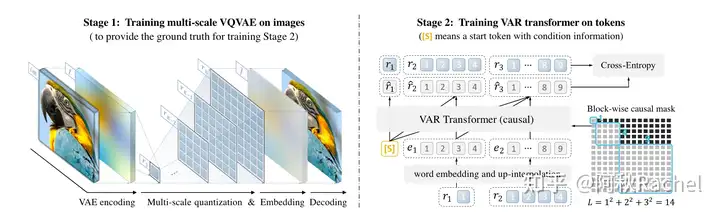
对于该multi-scale VQVAE的构造,作者采用了残差设计的思想,而不是每个尺度单独重建恢复原图,也就是说原图的特征会被分解成多个尺度量化后token的组合。具体流程如下:
- 将原来image continuous feature离散化成对应第 \(k\) 个尺度下的 \(h_k \times w_k\) 的token map
- 对该token map进行插值和变换,对齐原始image feature的空间分辨率大小 \(H \times W\)
- 从image feature中减去该尺度插值后的token map,表示已经重建恢复一定部分内容,剩下待重建的内容作为下一个尺度重建内容的目标
此时VQ-GAN进行deocde重建时,也需要利用残差的思想,将所有尺度的重建结果进行组合
- 对每个尺度的token map进行插值和变换,对齐原始image feature的分辨率
- 累积该token map重建的部分
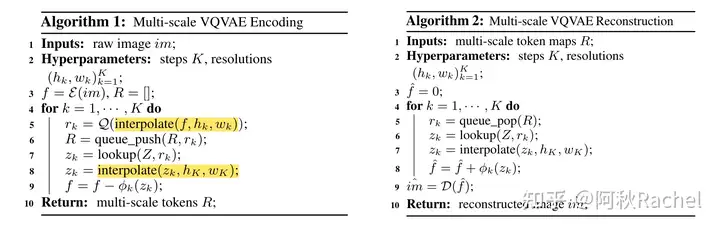
通过上述quantize + dequantize过程可以完成图像的重建,以实现multi-scale VQVAE的训练。由于采用的discrete image tokenizer,因此可以使用CE loss的方式以实现VAR transformer的训练。
上述过程随之而来一个问题就是,当生成图片的时候,一定需要所有尺度都生成完成,才可以完成最后输出图片的累积吗?例如一开始只有一个<boi>,然后生成1x1 token map再生成2x2 token map,再生成3x3 token map,再生成5x5 token map,最后组合前面四个结果得到最终生成的图?如果是的话,那推理是怎么控制一次并行输出多个scale token的?
我们对应到def autoregressive_infer_cfg()用于自回归代码部分可以发现,确实是需要逐个scale自回归生成,但并不是像训练一样,每次尺度的token map预测都需要concat上之前尺度的预测,而是对上一个尺度输出token map插值到下一次scale生成对应所需要的分辨率,此时每次transformer的输入仅仅只有当前需要产生的尺度,类似于将上一个尺度插值得到的粗糙结果进行清晰化。
1 | f_hat, next_token_map = self.vae_quant_proxy[0].get_next_autoregressive_input(si, len(self.patch_nums), f_hat, h_BChw) |
实验上主要做的class-conditional synthesis,以class emebdding作为[s] start token放在序列最开始,用以引导后面各个尺度的生成,并且会用AdaNorm对class condition进行增强,还会对query、keys进行norm来稳定训练,代码中其实还有很多细节在文中没有被强调,感兴趣的可以去阅读源码。
STAR
STAR是将上述工作从class-condition拓展到text-condition,以实现利用文本定制化生产图片的效果。
VAR方法使用AdaNorm来注入条件信息对于文本这种具有丰富信息的输入来说太过简单,因此提出了用一个额外的clip text encoder来提取文本表征作为控制信息,并通过额外的cross attention注入到transformer中。为了进一步提升预测过程图像内部的结构性,提出使用2D的RoPE来取代VAR中的learnable absolute position embedding。
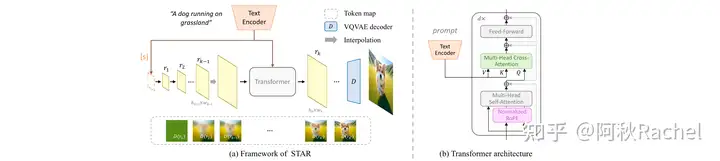
具体来说,CLIP text encoder最后提取出来的text prompt embedding会被pooling 产生一个single vector,并作为visual scale autoregressive 的[s] start token。起始的1 × 1 token缺乏传达足够的文本细节的能力,并且在随后的尺度中存在被遮蔽的风险,因此提出了在self attention和mlp之间插入额外的cross attention模块来向每个scale的预测中引入条件信息,要点
- 以[s] start token作为预测起点,主要决定了输出内容的全局信息。
- 以scale-wise的形式,每次自回归的预测一个固定分辨率大小的token map
总结
Visual autoregressive的多模态生成范式变化。
从MLLM并行输出作为condition变化到使用离散化的图像tokenizer使得MLLM能够统一生成和理解任务。离散化使得MLLM可以实现用CE loss来监督并且带来了抛弃下游生成模型的可能性,但是通常会带来理解任务性能的大幅降低。采用continuous tokenizer来融合图像的生成,可以缓解理解任务性能的下降,但是生成的监督信号需要更多的设计思考,并且似乎无法摆脱下游生成模型的引入。visual scale autoregressive更多是纯纯在做生成,希望能用更好的scaling性质来取代diffusion的位置。感觉问题归根结底在于:到底图像怎么样用生成实现理解的效果,目前看起来任重而道远。
参考
1 | [1]SEED https://arxiv.org/abs/2307.08041 |